Chasing Sunset rocket [WIP]
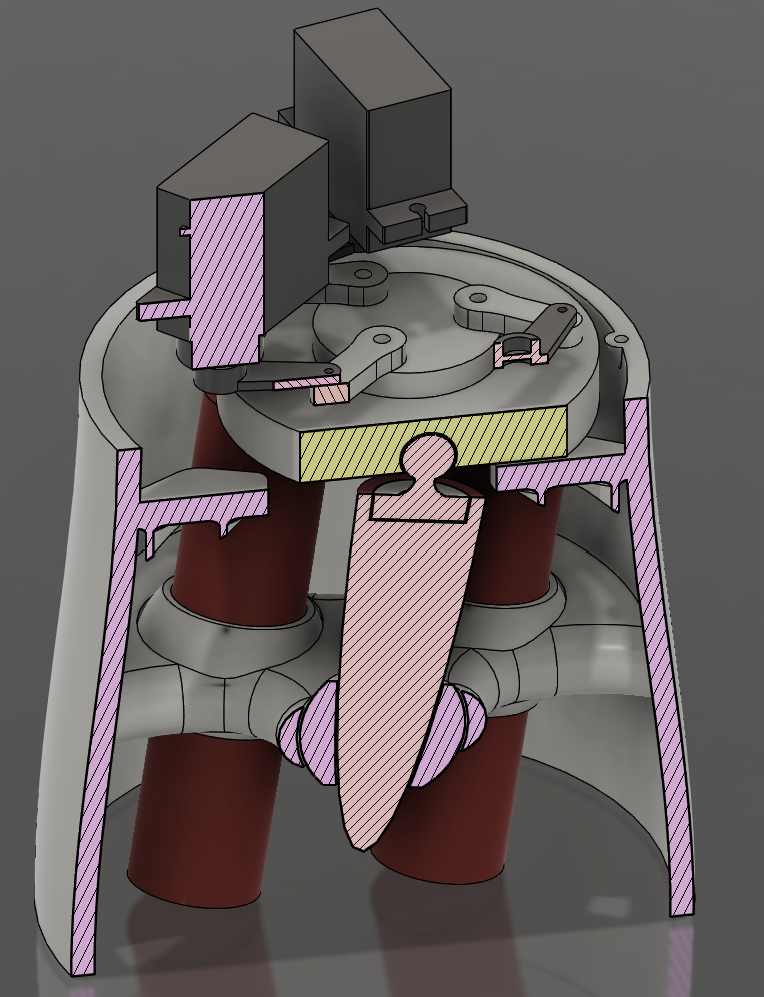

This project builds upon the Red Hill thrust vectoring design incorporating a much more robust manner of displacing the thrust plate. Three servo's work in conjunction to move the thrust plate into position.
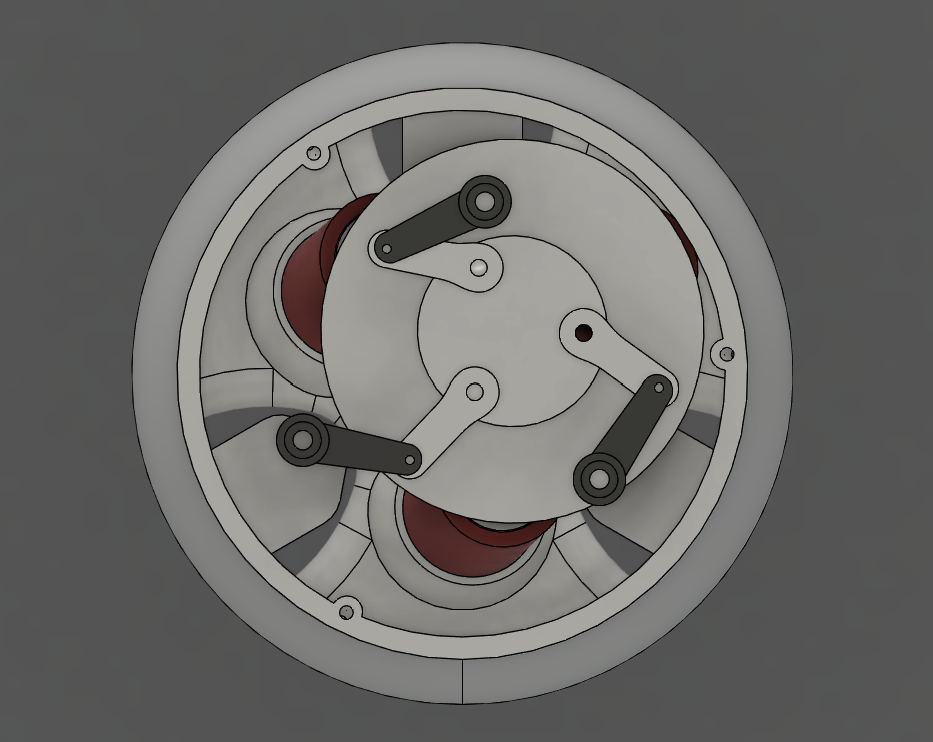
This design can also handle much stronger forces from the motors as the flat surface of the plate underneath the arms is the first layer of the 3D print onto a glass bed meaning it has a mirror surface. This plate slides along the bottom of the servo mount (not visible in picture) that was 3D printed in the same manner. This smooth surface along with some WD40 allows the plate to move smoothly even under high loading.
 | I first created a graph in desmos where I could visualize the desired positions of each servo. From there I could perform the trigonometry and get 3 equations relating the desired position in cartesian coordinates to an appropriate angle for each of the 3 servos. After encountering some issues with the Arduino trig functions the inverse kinematics worked perfectly aside but seemed to deviate when one of the servos fully extends. This ended up being due to the servos specifications being incorrect and they were not capable of the full range of motion. This could be remedied in code though. A more pressing issue was the flexibility of the plastic horns used by the servos. These create inconsistent precision and slop in the mechanism. A short term was implemented by tightening each servo after assembly but I am still looking into a better solution. |
You should also read:
Simple and quick CAD software for brainstorming [WIP]
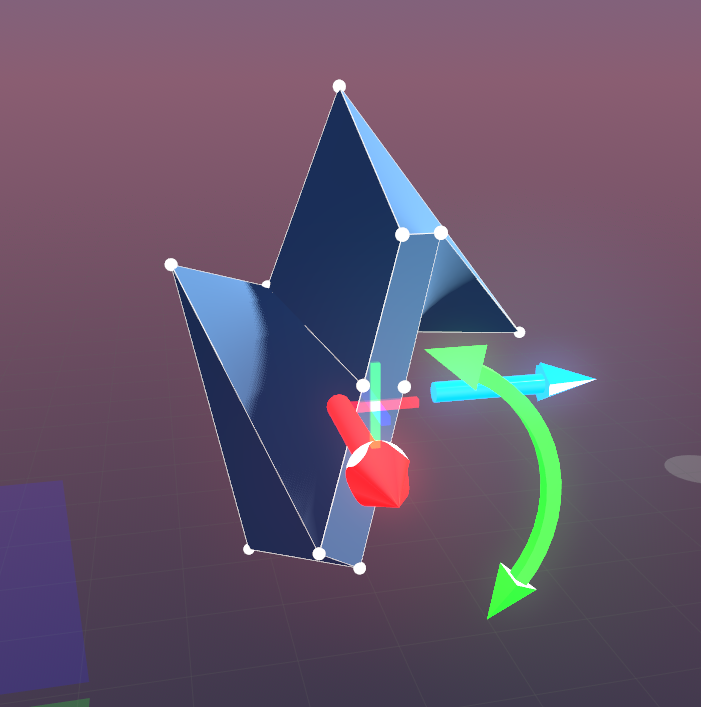
I have started creating an intuitive and fast 3D modelling software that remains parametric but allows modifications of the geometry in real time and keeps everything as interactable and intuitive as possible. As opposed to almost all CAD programs it generates and manipulates mesh geometry…
Continue reading...
Red Hill rocket
The red hill rocket employs a novel thrust vectoring system wherein the rocket can tilt a cluster of motors attached the a thrust plate using only 3 motors. The inverse kinematics of this first system was very simple as the plate was simply attached to…
Continue reading...
DIY Jet engine [WIP]
Building a jet engine that can sustain combustion has been a dream of mine for a long time and these are the first steps. The above render is the first mock-up and has many issues. Firstly the volume of air should diminish as it traverses…
Continue reading...
Comments