| Week Number | Key tasks | Issues discovered |
| Week 1. | Brainstorming a blind assistance idea and how it would be achieved. Looked at alternative solutions
already in place and refined idea to differentiate it. Also developped a method to mount sensors. | Found ideal sensors
for the project that are compact, precise and can resolve finer details. But decided to first attempt using ultrasonic
sensors because they were more readily available, despite their limitations |
| Week 2. | Researched how
to generate audio programmatically as it is being played. Then i developped code to create the audio dynamically. | Struggled sending the audio player the right
data type (float32 instead of float64) |
| Week 3. | Fixed issue where too many audio streams where being created causing the pi to run out of memory and crash,
finally allowing test audio to be created. | Ultrasonic sensors do not read distance at angles over about 20 degrees to a flat
surface, aswell as giving unreliable readings off of complex surfaces. |
| Week 4. |
Integrated the distance sensor code with the audio generation and prototyped various warning sounds changing
in pitch, tempo and volume. |
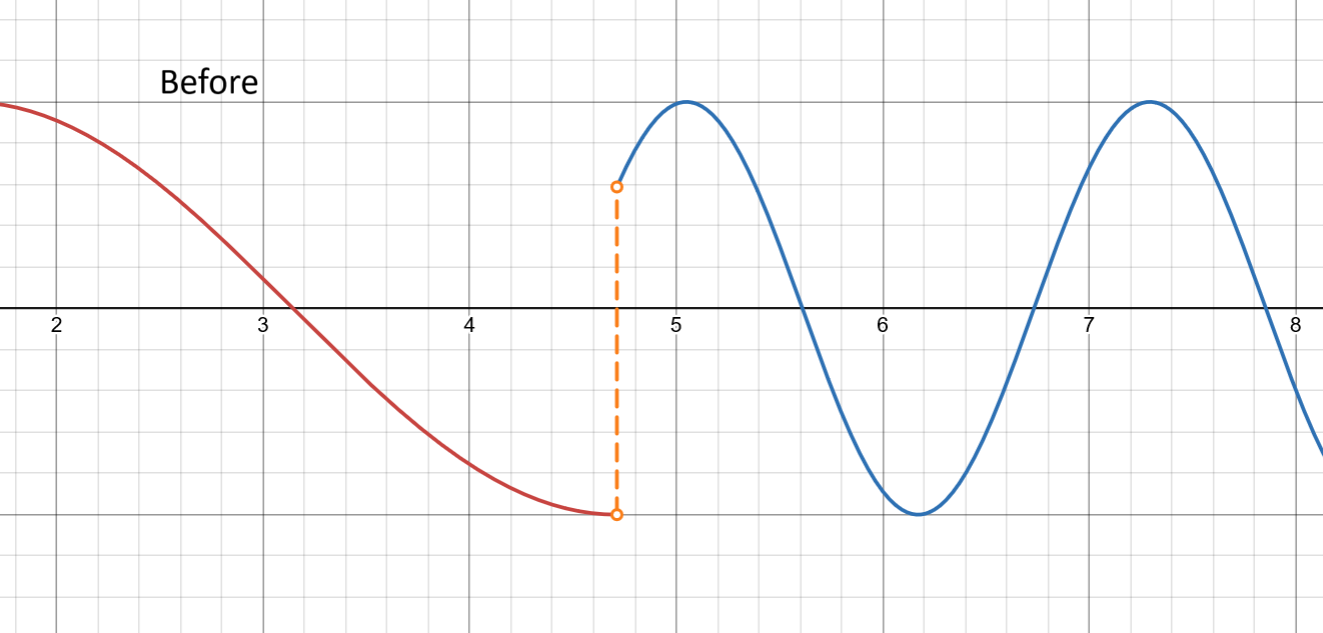
Noticed a popping sound as the audio doesn't match up from the previous loop. |
| Week 5. |
Added stereo sound capabilities. |
Latency is still higher than required and sensors can't detect soft surfaces or sharp angles. Decided to switch to the aformentioned
sensors. |
| Week 6. | Tried to implement example code from github to make the camera recognise objects. Did fresh install of Raspberry pi.
| Raspberry pi would crash when the installing required libraries though. Even after attempting to completely wipe the device and
try again the problem got even worse when the Raspberry pi would refuse to install any libraries forcing me to revert back to the previous
installation. |
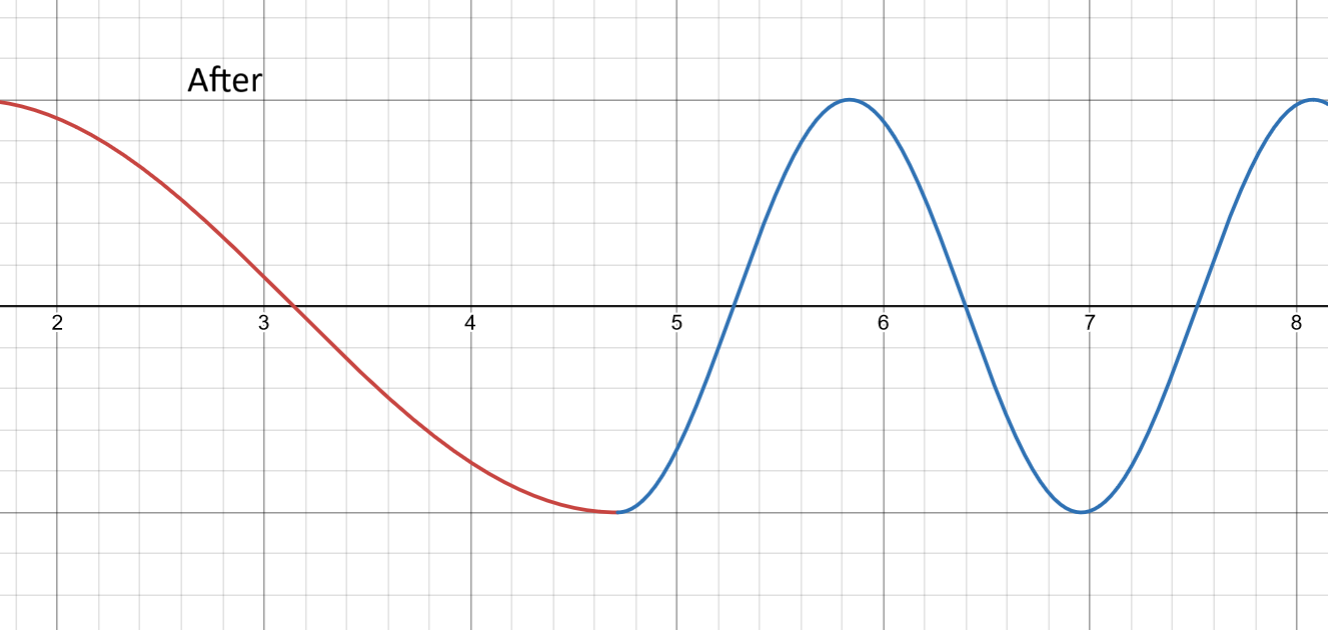
| Week 7. | Changed how audio is prepared so that the waves change smoothly from one frequency to another and the new sample
starts in phase with the last reducing latency as well as removing skipping sound. Added exponential fallof for the volume of the audio
because it feels more natural and approximates real sound deafening.
| I discovered that these sensors cannot have seperate I2C bus addresses meaning they can't work on the same bus and will probably require a multiplexer to use two at a time. |
| Week 8. | (Mocks) | |
| Week 10. | Got to work trying to make new sensors compatible. Analysed the example
arduino code to create an Python equivalent for the raspberry pi.
| The registers in the example code were wrong for my application so i had to search them for the usable data. The 2 octet to 16bit integer conversion
code was also wrong.
|
| Week 11. | Integrated new sensor code into the main program and also enabled a second IIC bus in the Raspberry pi config file to be able
to run left and right sensors simultaneously. | Skipping issue reemerged for no apparent reason after switching to new sensors. Eventually discovered
it was due to the program waiting for sensor data to be available after sending request so the audio would pause for a fraction of a second. |
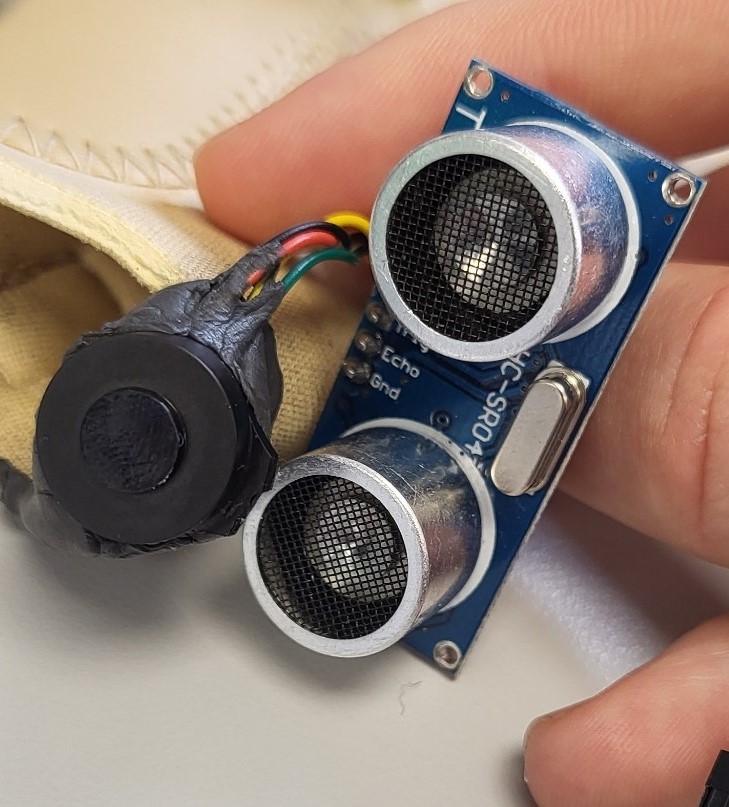
| Week 12. | Mounted sensors and Raspberry pi to a wrist brace using moldable glue and a needle and thread. Also wired up a button for gathering
data to tune the warning response. Added interaural time delay to enhance stereo effect. |
Volume L/R shift was switched with the interaural time delay L/R shift leading to a weird effect where I could not figure out where the sound was coming from
because these two effects were opposing.
|
| Week 13. | Implemented emergency warning system and realtime graphing. Started recording for video and capturing the sound from the device. |
Found strange issue where the audio that was recorded would play on the raspberry pi but not on the laptop, analysing the file in video editing software showed no
audio channel. In the end had to play the file specifically in VLC then re-screen record it to capture audio that the video editing software could read.(This introduced
a crackle to the audio)
|
| Week Number | Test | Result |
| Week 3. | Tested Ultrasonic sensor in a variety of situations (different materials, angles, shapes and distances).
Compared output with distance measured using a meter stick |
Very inconsistent readings on soft surfaces, complex shapes and even on relatively shallow angles. |
| Week 3. | Tested mono audio generation (pure tone) | Raspberry pi crashes after a few audio tones are played |
| Week 4. | Tested mono audio generation with 2 harmonics | Audio almost sounds like a heartbeat sounds good as a warning
at higher pitch. Audio skips between samples (popping sound). |
| Week 5. | Tested stereo audio generation | Changing volume in each ear is less noticable than expected. And mismatched
tempos between left and right is confusing |
| Week 7. | Tested audio output changing through a range of frequencies | Audio popping is indeed gone |
| Week 10. | Tested new infrared LiDar sensor's output against a meter stick | Very precise output down to the millimeter
although closest distance it can measure is 2cm |