Red Hill rocket
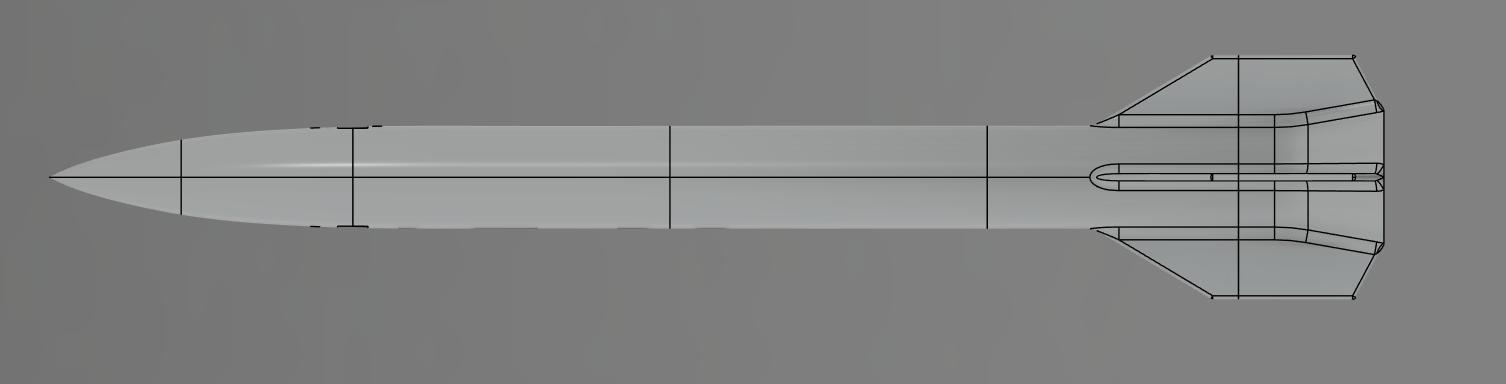
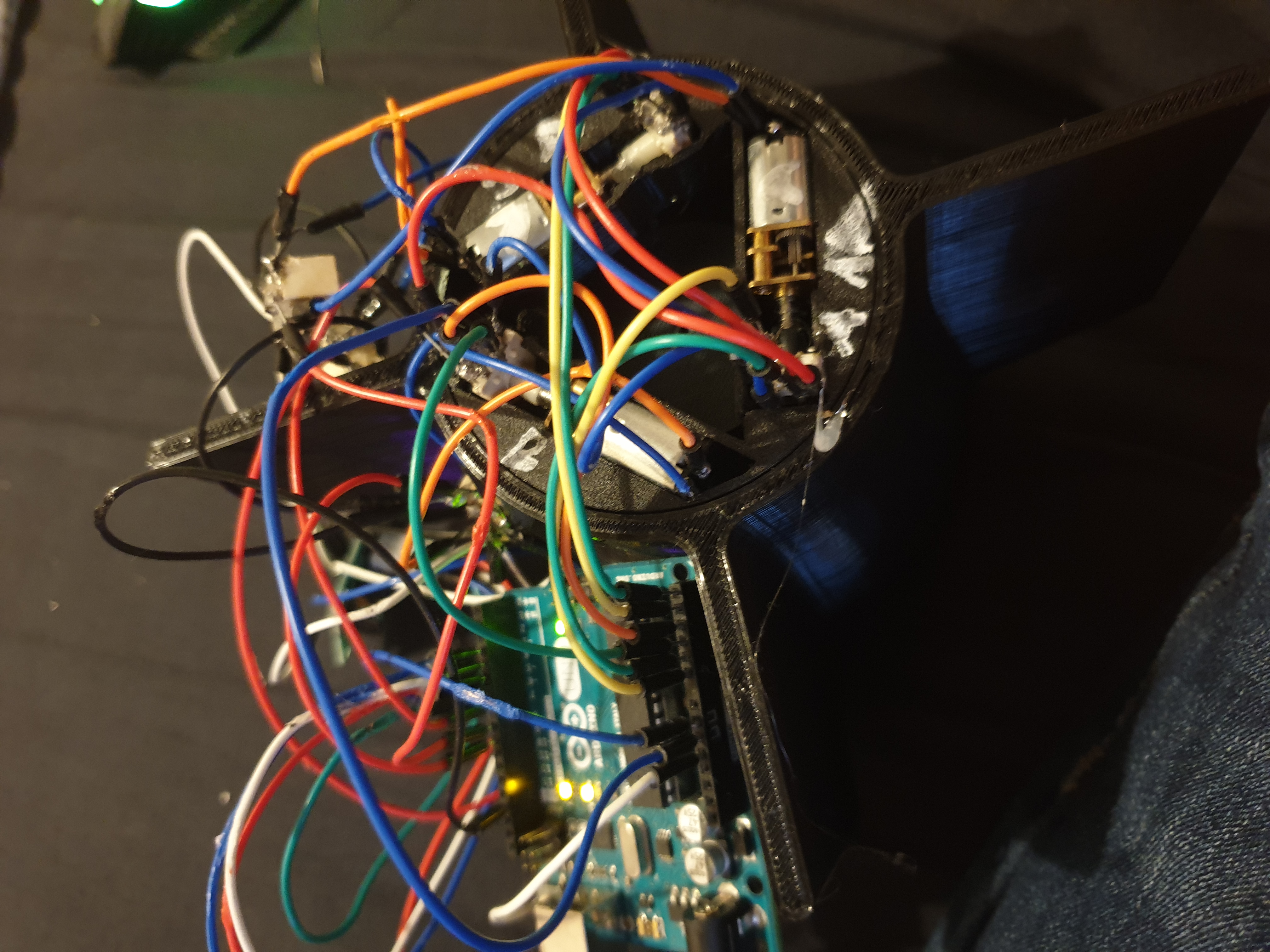
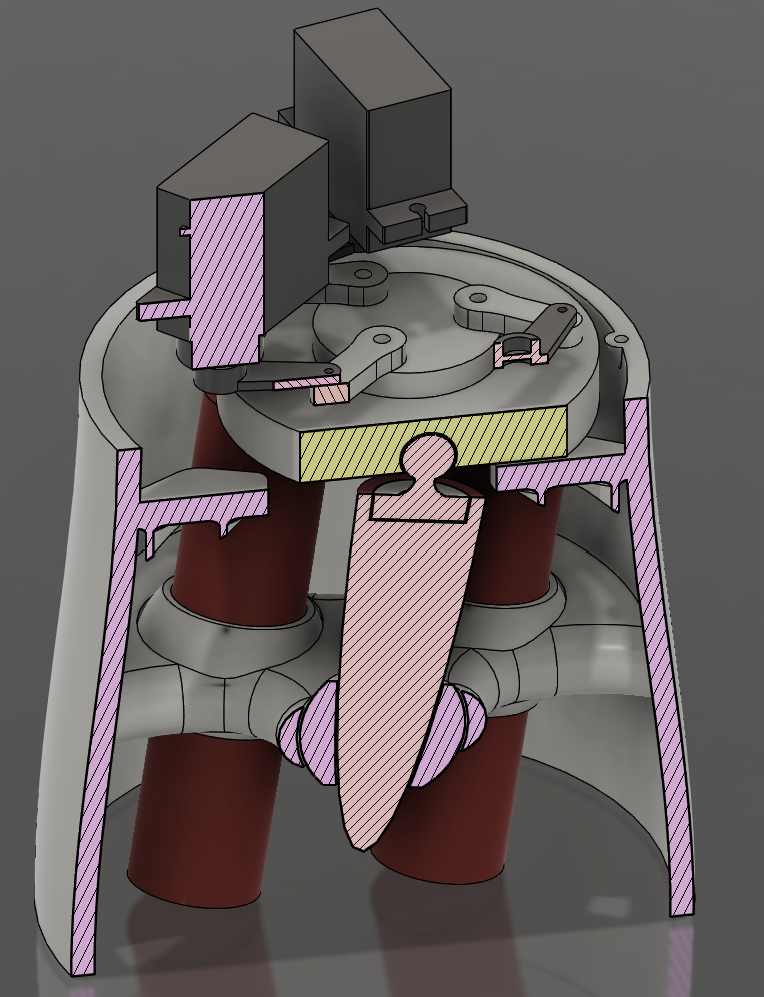
The red hill rocket employs a novel thrust vectoring system wherein the rocket can tilt a cluster of motors attached the a thrust plate using only 3 motors. The inverse kinematics of this first system was very simple as the plate was simply attached to 3 strings driven by small motors. However precise angle control of the geared motors was a challenge. Fishing wire was wrapped around a 3d printed piece that connected to the motor and 2 potentiometers. 2 of them were needed because they each only had about 200 degrees of useable data. Combining these sensors and filtering interference, vibration while counting the turns of the pulleys turned out to be a challenge. With all this done tuning a closed loop PID controller was the next challenge. Throughout the testing however the fishing wire proved too elastic and broke too easily. Eventually I moved on too a different thrust vectoring design with my Chasing Sunset rocket. This rocket was sadly abandoned although it served as a useful testbed for construction and parachute deployment systems. | 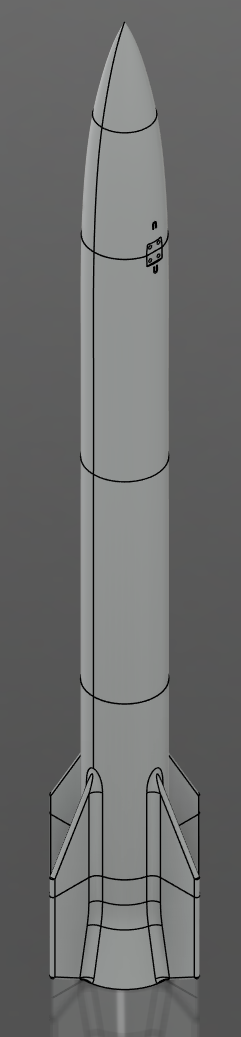 |
The wiring for 3 double switch double throw relays also quickly became a nightmare even though I later switched to H bridge motor controllers this gimballing solution was clearly less than ideal.
So I took what I learnt from this project and moved on to the much more elegant gimbal design employed in my Chasing sunset rocket.
You should also read:
Chasing Sunset rocket [WIP]
This project builds upon the Red Hill thrust vectoring design incorporating a much more robust manner of displacing the thrust plate. Three servo's work in conjunction to move the thrust plate into position. This design can also handle much stronger forces from the motors as…
Continue reading...
Comments